- События
- Барахолка
- Геоточки Беларуси
- Форум
- infoИнфоцентр
- sms_failedОбратная связь
Туризм и спорт в Беларуси. Свободный сайт для планирования событий спортивной и туристической тематики. Здесь те, кто гоняет во всю мощь.
© poehali.net 2002-2026 Belarus
Новый привод
Уважаемые господа, предлагаю Вашему вниманию конструкцию двух приводов, один из которых предназначен для веломобилей, а другой для инвалидных колясок.
Основным недостатком классического привода является то, что уже на цепь передается, в самом лучшем случае, 63, 7% усилий, прилагаемых ногами человека к педалям. Эти проценты относятся также к полезной работе и к кпд. Взаимодействие ноги человека с педалями и шатунами можно сравнить с работой кривошипно-шатунного механизма, в котором то, что в велосипеде называется шатуном, является в теории машин и механизмов кривошипом, а шатуном является нога человека. Для полной передачи усилия ноги человека на цепь предлагается конструкция привода, в котором вращение ведущей звездочки с помощью педалей и шатунов заменено одновременными толкающими усилиями ног человека, прилагаемыми к педалям, неподвижно установленным на двух, жестко соединенных между собой, каретках, скользящих в направляющих профилях и протягивающих за собой с помощью сдвоенных храповых собачек приводную цепь, перекинутую через переднюю, свободно сидящую на оси звездочку, и заднюю ведомую звездочку, жестко посаженную на вал отбора мощности. Принцип действия и принципиальная схема такого привода изложены в описании «Привод1».
Привод для инвалидных колясок состоит из двух пар направляющих профилей, в каждой из которых перемещаются каретки, жестко соединенные между собой перекладиной, на которой установлены рукоятки для приложения усилий рук человека. На внешних боковых сторонах кареток установлены сдвоенные храповые собачки, равноудаленные от проложенных между ними цепей. Цепи перекинуты через верхние свободно посаженные на оси звездочки и нижнюю жестко посаженную на вал отбора мощности звездочку. Таким образом, на цепи будут передаваться практически полностью усилия рук человека прилагаемые к перекладине привода. Сложность заключается в том, что с помощью всего лишь двух рук необходимо приводить в действие транспортное средство, управлять направлением движения, осуществлять переключение передач и торможение, но она не является непреодолимой. Принцип действия и принципиальная схема такого привода изложены в описании «Привод2».
Привод1
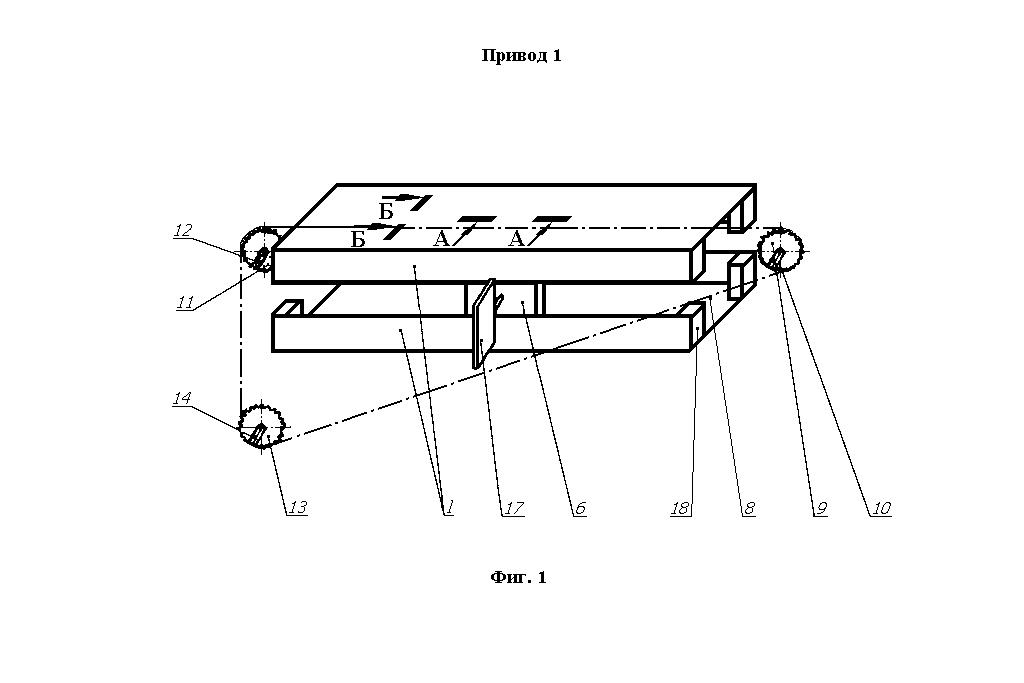
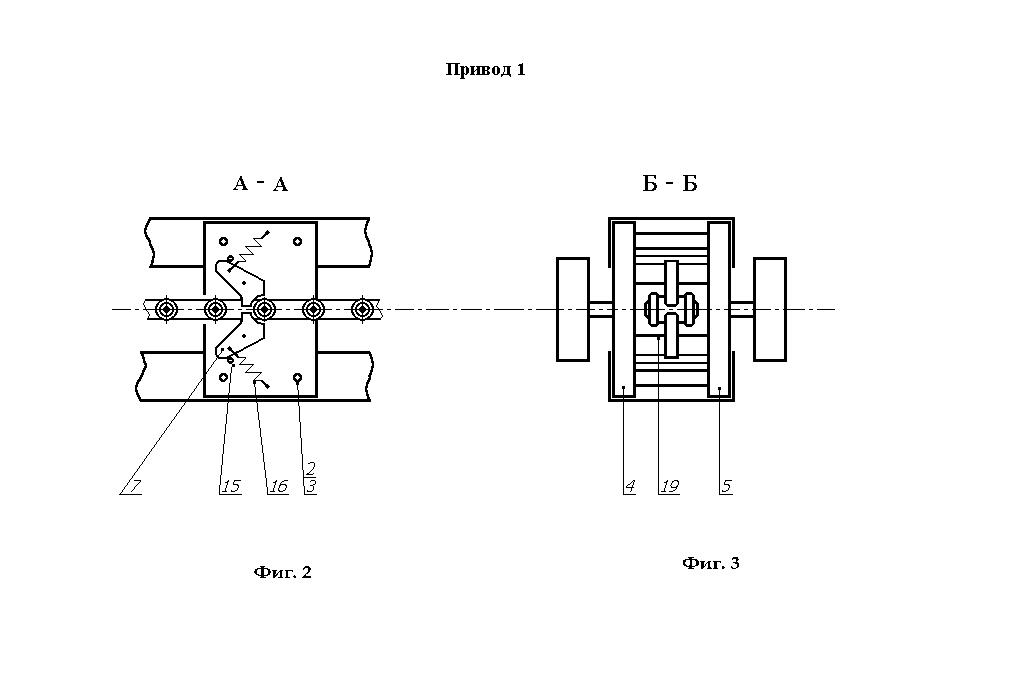
В двух направляющих профилях 1 имеют возможность совершать возвратно-поступательные перемещения две, жестко соединенные между собой болтами 2 через распорные втулки 3, каретки 4, 5, образующие единый блок кареток 6. Между внутренними, обращенными друг к другу, поверхностями кареток 4, 5 расположены оппозитно две храповые собачки 7 для одновременного двустороннего захвата и протягивания вслед за блоком кареток 6 проложенной между ними цепи 8, перекинутой: через переднюю звездочку 9, свободно посаженную на ось 10, через заднюю звездочку 11, свободно посаженную на ось 12, и через ведомую звездочку 13, жестко посаженную на вал отбора мощности 14. Рабочая поверхность пары храповых собачек 7, удерживаемых на упорах 15 прижимными пружинами 16, образована цилиндрической поверхностью, диаметр которой равен диаметру втулки звена цепи 8. На внешних боковых сторонах блока кареток 6 установлены педали 17 для приложения усилий ног человека. Использование для захвата звеньев цепи 8 двух храповых собачек 7 позволяет более надежно захватывать цепь 8 при укороченной длине рабочих зубьев. В свою очередь, укороченные рабочие зубья облегчают выход храповых собачек 7 из зацепления с звеньями цепи 8 при обратном ходе блока кареток 6. Жесткое соединение кареток 4, 5 допускает только одновременное использование ног во время работы привода, позволяя выбрать такое расположение педалей 17 на каретках 4, 5, при котором силы, прилагаемые ногами человека к педалям 4, 5 и сила реакции захваченного храповыми собачками 7 звена цепи 8, находятся в одной плоскости. Блок кареток 6 не доходит до ограничителей 18 во время работы привода, так
как они необходимы только для предотвращения соударения блока кареток 6 с другими подвижными деталями привода в случае его (блока) неконтролируемого перемещения в направляющих профилях 1. Привод приводится в действие одновременным нажатием ногами на педали 17 блока кареток 6, находящегося в исходном, т.е. в крайнем заднем положении. Усилия ног от педалей 17 передаются на блок кареток 6, а от него, с помощью храповых собачек 7, на цепь 8. Далее усилия передаются на ведомую звездочку 13, а от нее – на вал отбора мощности 14. Если усилие, передаваемое на вал отбора мощности 14, больше сопротивления нагрузки, то блок кареток 6 продвигается вперед по опорным поверхностям направляющих профилей 1, протягивая с помощью сдвоенных храповых собачек 7 цепь 8, которая вращает переднюю 9 и заднюю 11, свободно посаженные на оси 10, 12 соответственно, звездочки и ведомую звездочку 13, а через нее - вал отбора мощности 14. После достижения блоком кареток 6 крайнего переднего положения он возвращается в крайнее заднее положение усилиями ног человека. При этом сдвоенные храповые собачки 7, преодолевая незначительное сопротивление прижимных пружин 16, поворачиваются на своих осях 19, выходят из зацепления с втулкой роликовой цепи 8 и скользят по поверхностям остальных втулок. После достижения блоком кареток 6 крайнего заднего положения рабочий цикл повторяется и т. д. Рисунки здесь: Фиг1 http://b0.imgsrc.ru/k/korvet/8997064esm.jpg Фиг2 http://b0.imgsrc.ru/k/korvet/8997065vjL.jpg
Привод2
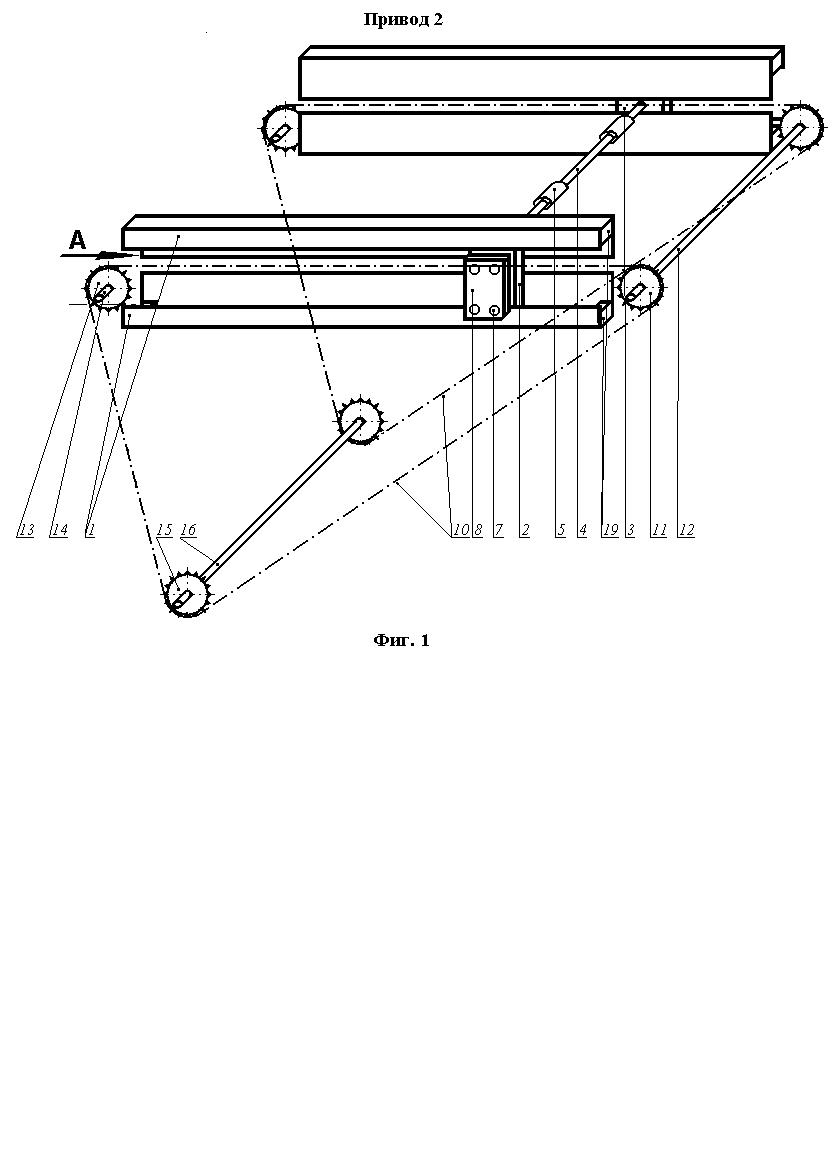
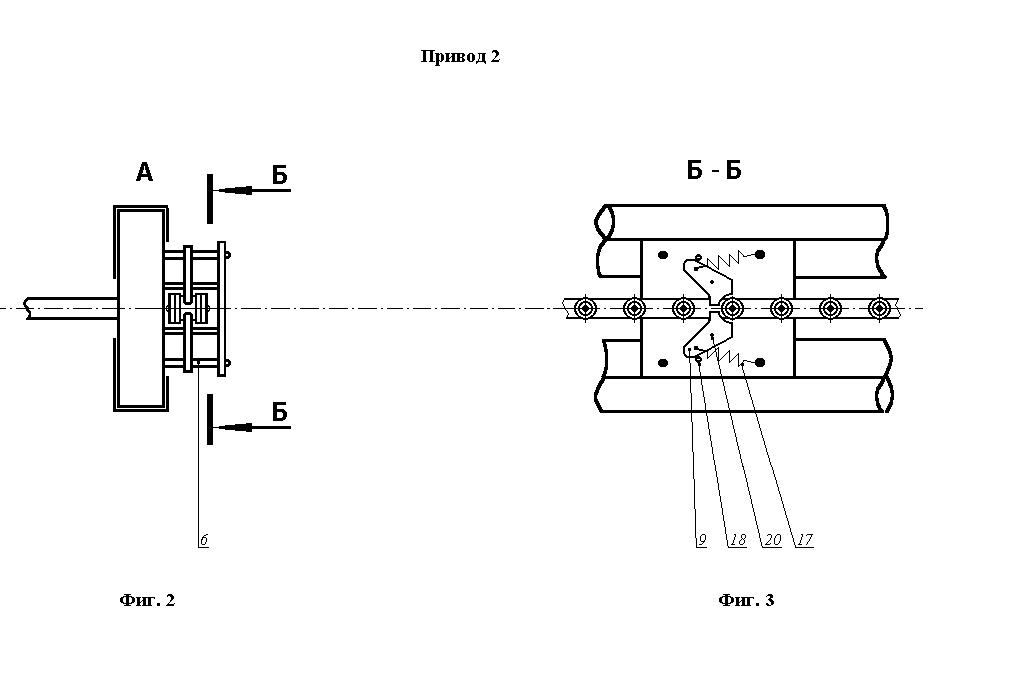
В двух парах направляющих профилей 1 совершают возвратно-поступательные перемещения каретки 2, 3, между внутренними, обращенными друг к другу, поверхностями которых расположена, жестко соединяющая каретки 2, 3, перекладина 4, на которой установлены две передвижные рукоятки 5 для приложения усилий рук человека с возможностью фиксации в месте установки. Между внешними боковыми поверхностями кареток 2, 3 и установленными на них через распорные втулки 6 с помощью болтов 7 щитками 8 установлены оппозитно по две храповые собачки 9 для одновременного двустороннего захвата и протягивания вслед за каретками 2, 3 проложенных между ними цепей 10, перекинутых через передние звездочки11 свободно посаженные на ось 12 и задние звездочки 13 свободно посаженные на оси 14, а также через ведомые звездочки 15, жестко посаженные на вал отбора мощности16. Рабочие поверхности каждой пары храповых собачек 9, находящихся под действием прижимных пружин 17 на упорах 18 образованы цилиндрической поверхностью, диаметр которой равен внешнему диаметру втулок звеньев цепей 10. Использование для зацепления звеньев каждой цепи10 двух храповых собачек 9 позволяет более надежно захватывать цепи 10 при укороченной длине рабочих зубьев. В свою очередь, укороченные рабочие зубья облегчают выход храповых собачек 9 из зацепления с звеньями цепей 10 при обратном ходе кареток 2, 3. Во время работы привода каретки 2, 3 не доходят до передних и задних
ограничителей 19, так как они необходимы только для предотвращения соударения кареток 2, 3 с другими подвижными деталями привода в случае их (кареток) неконтролируемого перемещения в направляющих профилях 1. Направляющие профили 1 установлены на высоте, обеспечивающей наиболее эффективное использование усилий рук человека.
Привод приводится в действие одновременным приложением усилий рук человека к рукояткам 5, усилия от которых передаются на перекладину 4, а от нее - на каретки 2, 3, от которых усилия рук человека передаются посредством храповых собачек 9 на цепи 10, а от них - на ведомые звездочки 15 и далее – на вал отбора мощности 16. Если усилие, передаваемое на вал отбора мощности 16, больше сопротивления нагрузки, то перекладина 4 вместе с каретками 2, 3 перемещается вперед, протягивая с помощью храповых собачек 9 цепи 10, которые через ведомые звездочки 15 вращают вал отбора мощности 16. После достижения перекладиной 4 с каретками 2, 3 крайнего переднего положения она возвращается в исходное, то есть в крайнее заднее положение, усилиями рук человека. При перемещении кареток назад храповые собачки 9 отходят от захваченных ими звеньев цепей10. В результате давления на задние поверхности храповых собачек 9, оказываемого набегающими звеньями цепей 10, храповые собачки 9, преодолевая незначительное сопротивление прижимных пружин 17, поворачиваются на своих осях 20 и скользят по поверхностям
остальных втулок. После достижения перекладиной 4 крайнего заднего положения рабочий цикл повторяется и т. д. Рисунки здесь: Фиг1 http://b0.imgsrc.ru/k/korvet/8997066LYt.jpg Фиг2 http://b0.imgsrc.ru/k/korvet/8997067Hpo.jpg
лосепедисты с веломании тоже не оценили преимуществ тупого толкания (а не кручения) цепи по звездам :)
ValeryT, тупое толкание ничуть не тупее тупого кручения цепи по звездам.
Korvet, бездушное железо расставит все по своим местам. Если есть готовый образец привода, и он имеет реально большее КПД чем у класического педального - смело пишите об этом. Я вот тоже, когда затевал работу по изготовлению рамы велосипеда из носков, пропитанных эпоксидкой, начитался всякого в свой адресс. А не тут то было - ездит она и не разваливывается, даже на тренировочной КК трассе "семь пупырей"
Цитата сообщения от korvet отправленного 17 Июл, 2008 в 07:28
ValeryT, тупое толкание ничуть не тупее тупого кручения цепи по звездам.
Тупее - так как его надо еще делать :)

Один нюанс: насколько новый привод отличается от традиционного по таким параметрам как стоимость изготовления и обслуживания, надежность в эксплуатации, массогабаритные характеристики и.т.д. Высокий КПД - это еще не все!
Уважаемые господа, хочу построить веломобиль со своим приводом, но воспользоваться для этого знаниями, опытом и производственными возможностями других на договорной, естественно, основе. Прошу подсказать, где и с кем можно договориться. Сам я нахожусь в Белоруссии, г. Бобруйск, и желательно, чтобы другая договаривающаяся сторона была расположена как можно ближе.
AlexM7788, я не бухгалтер.
бесперспективняк.
еще раз спрошу - модель сделал? я к тому что не хватит здоровья цепь протянуть ногами. потому что она тянется по звездам. я встречал подобные механизмы, но там нагрузка была не на осях звезд, то есть цепь использовалась как блок.
а тут несколько другое - цепная передача. не будет работать.
проверь сам - возьми и потяни за цепь на обычном веле и посмотри хватит ли здоровья просто сдвинуть вел с места.
и даже если(????) работает - думаю любой нетренированый матрасник на веле в контактах сделает тебя на твоей тележке как ребенка. :)
или даже без контактов :)
Начнем с фразы которая вызвала большое количество непонятки и возмущения
на цепь передается, в самом лучшем случае, 63, 7% усилий
допустим имеется в виду то для чего придумали контактные педали - обеспечить круговое педалирование.
педали против топталей НП(новый привод):
"+"педальной системы
- вес
- надежность
- напорядок меньшие потери на куче механизмов. у педалей только подшипники качения каретки и самих педалей, в НП скольжение на направляющих, подшипник вала, потери на трещетке, плюс потери на отсутствующем механизме синхронизации педалей - давя на одну педаль вниз* мы должны выталкивать вверх* вторую педаль
(вверх-вниз понятие чисто условное) - гармоничность работы ног - y=A*cos(t); f~v(y)=y'=Asin(t)
y= высота подъема ноги над осью каретки.
f- усилие
v - вертикальная скорость ноги.
c учетом того что одна нога весит 15-20кг, то нельзя пренебрегать тем что в НП в двух крайних точках мы вынуждены прикладывать дополнительные усилия что б РЕЗКО остановить ногу и придать ей противоположное направление движения. - меньший вес.
вопрос денег принципиально не расматривается
велосипед против веломобиля (лежачего велосипеда)
+велосипеда:
- вес
- проходимость: перепрыгнул через бордюр, заехал в крутую горку.......
- эффективность работы ног. в велосипеде ноги опущены в низ, в веломобиле - ноги вытянуты вперед. необходимо ПОСТОЯННО их держать на весу. как вариант для веломобиля сделать засинхронизированную от привода(педалей) подпорку для ног - в районе колена или бедра. плюс в велосипеде нет проблемы с оттоком крови из ног
- маневренность
+веломобиля:
- раза 2 меньшее лобое сопротивление ветра
- меньше нагрузка на попу и спину.
- можно обеспечить хорошую защиту от дождя.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
а можно расчеты КПД в студию
чел чета путает. система шатун-звезда предполагает выигрыш в силе и проигрыш в расстоянии, то есть РЫЧАГ. а
у него - нет никакого рычага, тупо толкаешь ногой цепь. то есть заведомо проигрыш в силе.
не понимаю.
Цитата сообщения от отправленного 21 Июл, 2008 в 00:13
чел чета путает. система шатун-звезда предполагает выигрыш в силе и проигрыш в расстоянии, то есть РЫЧАГ. а
у него - нет никакого рычага, тупо толкаешь ногой цепь. то есть заведомо проигрыш в силе.
не понимаю.
а кто мешает с зади поставить большие звезды?
можно. тогда получим проигрыш в расстоянии уже на колесе. а если учесть что эффективный ход ноги сантиметров 25-30, то....
проще все выбросить и прицепить педали прямо к колесу.